
-
-
В этом году внимание всего мира было привлечено к Марсу, куда американцы доставили и где успешно использовали свои планетоходы Spirit и Opportunity.
На нашу долю, как это часто бывает в последнее время, осталось лишь разделять радость американцев и утешать себя тем, что и мы когда-то в состоянии были запускать аппараты на другие планеты.
(В одном из цехов ВНИИТМ)
Основным разработчиком шасси для планетоходов (колеса, двигатели, привод, подвеска, система управления ими) в СССР был (и остается до настоящего времени в России) ленинградский ВНИИтрансмаш (ВНИИТМ). В этом учреждении разрабатывались главным образом шасси для танков, так что был накоплен обширный опыт в области создания транспорта повышенной проходимости, ведь общее свойство у планетохода и танка - движение по неподготовленной местности.


(Робот СТР-1 для очистки крыши ЧАЭС от радиоактивного
мусора)
Здесь было создано и испытано множество самых различных устройств - Луноход 1 и 2 (1970), шагающий планетоход отправленный в 1971 году на Марс, прыгающий для Фобоса (1988), робот для очистки крыши разрушенного энергоблока Чернобыльской АЭС (1986), планетоход для неудавшейся экспедиции Марс-96, несколько планетоходов в рамках сотрудничества с зарубежными организациями (в последние годы) и т.д.

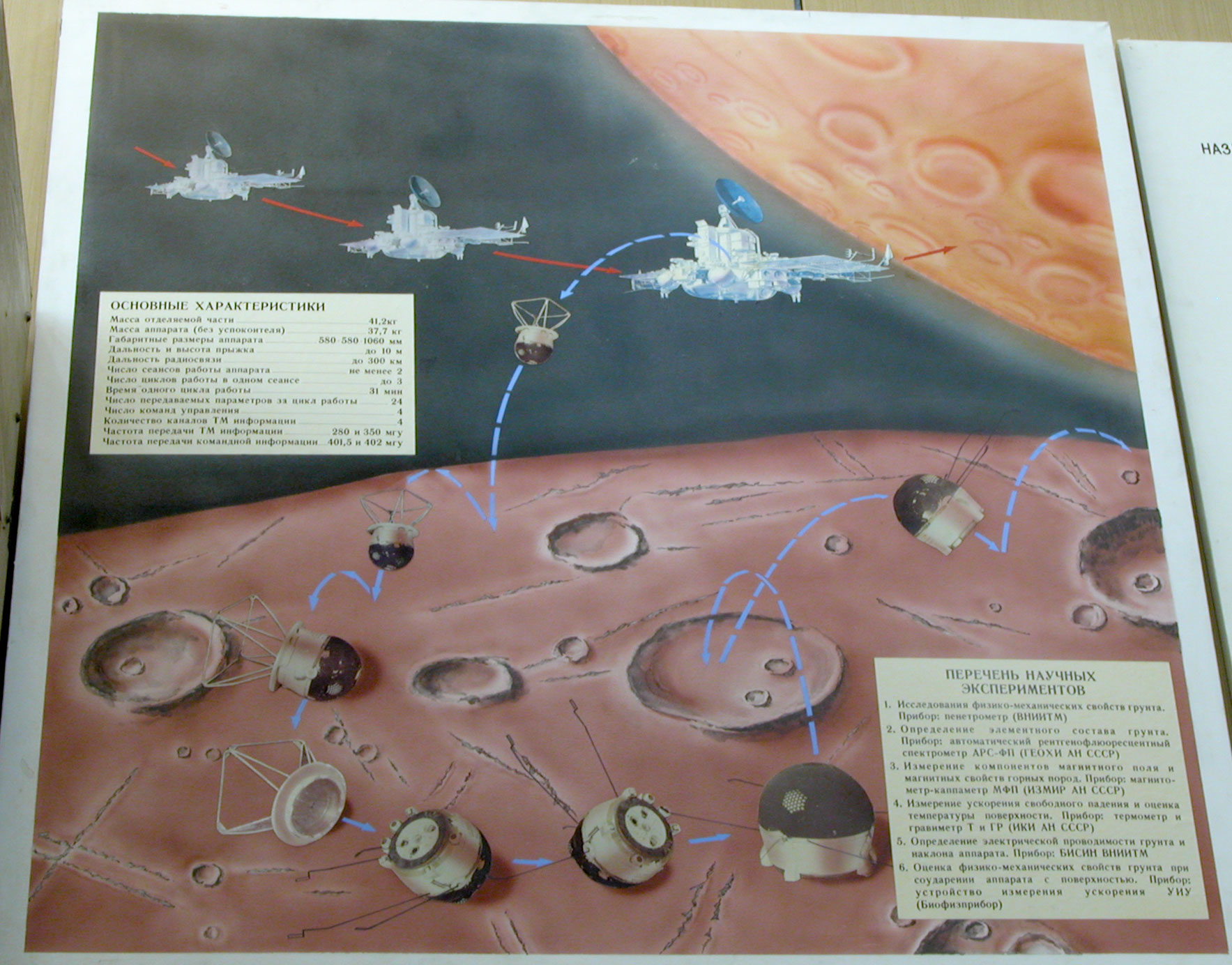
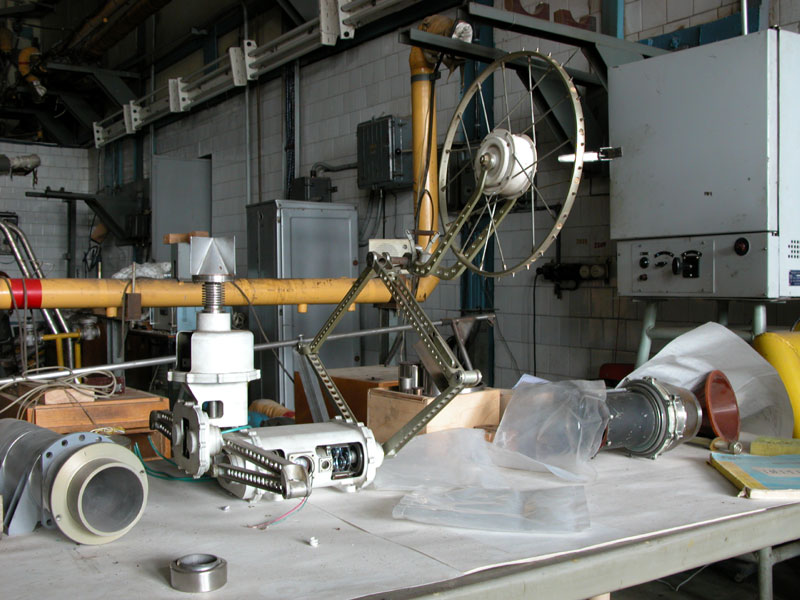
(Прыгающий аппарат для исследования Фобоса)
(Шагающий аппарат для исследования Марса
PROP v M, 1971)

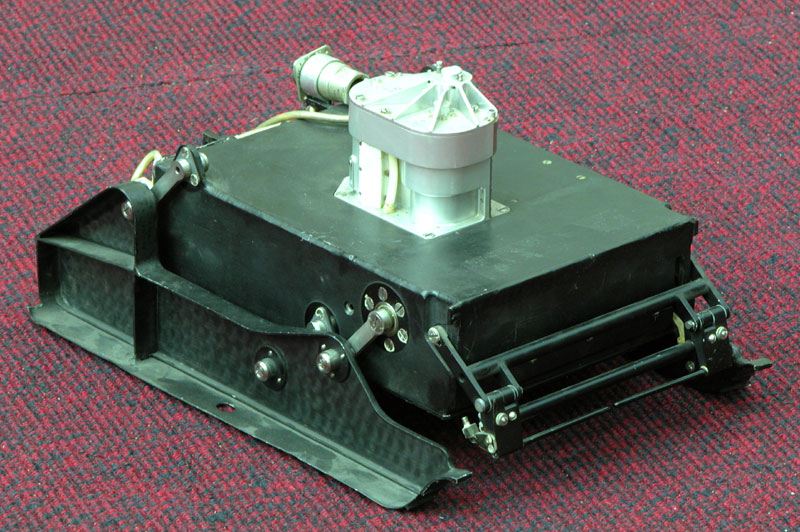
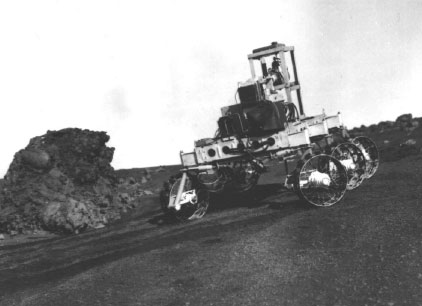
(Гусенично-шагающий марсоход)
В данной статье мы коснемся только разработанных и создаваемых во ВНИИТМ колесных планетоходов. Впрочем, как вы увидите, со времен своего изобретения, колесо, оставшись круглым, приобрело много новых черт.
Наверное многие обратили внимание, что те немногочисленные устройства которые реально перемещались по другим планетам - Луноходы, американские LRV (Lunar Rover Vehicle фирмы Boeing), Opportunity и Spirit (лаборатория JPL)- все они колесные. И это при том, что давно известно множество других подходов - гусеничный, шагающий и т.д. Видимо, есть серьезные причины выбирать именно колеса.
Почти все небесные тела которые доступны нам для исследования имеют твердую поверхность с множеством относительно ровных участков. Там нет болот, зыбучих песков, леса и растительности, которые могли бы потребовать гусениц или шагающих движителей. На Луне и Марсе, также как на Меркурии и Венере - везде колеса вполне можно использовать.
Колеса - очень экономичный вид движителя. Чтобы прокручивать, скажем, гусеницы, нужна куда большая мощность. А ведь это дополнительные батареи, которые нужно доставлять за сотни тысяч километров.
Важна и надежность - проблематично заменить на Марсе порванную гусеницу или сломанный рычаг ноги, в то время как поломка даже нескольких колес совсем необязательно ставит под угрозу выполнение задачи.
Теория движения колесных машин также разработана лучше всего. Достаточно вспомнить, что до сих пор почти не нашли применения шагающие машины, даже в хорошо изученных земных условиях.
Сравнительно прост и привод колес от электромоторов, легко обеспечивать разворот.
Итак, выбор колесного движителя явно оправдан. Давайте теперь посмотрим, как во ВНИИТМ решали проблемы возникающие при разработке конкретных аппаратов.
Колесо планетохода должно одновременно сочетать в себе множество требований - чтобы сказать пару слов про каждое, одной статьи недостаточно. Поэтому, давайте рассмотрим несколько вариантов колес созданных во ВНИИТМ со времен Лунохода и до наших дней, отметив их основные особенности.
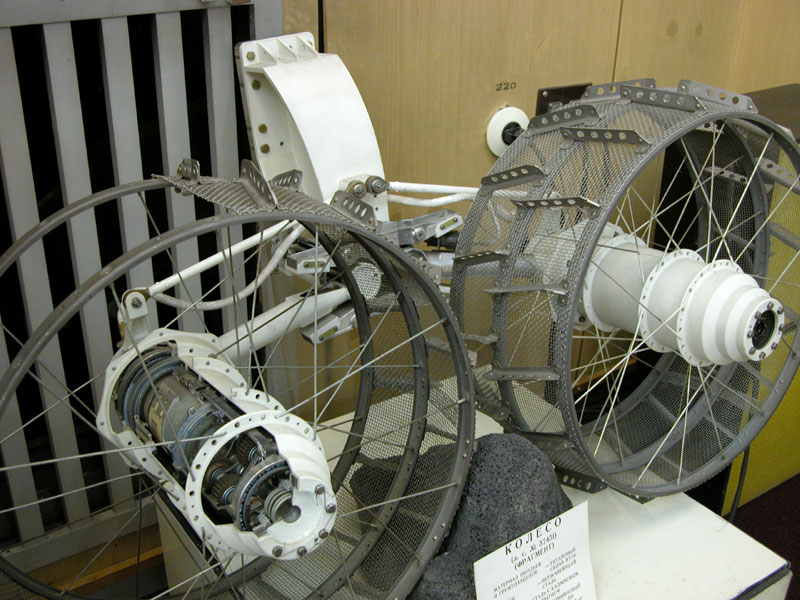

(Колеса Лунохода)
Колеса Лунохода уже можно считать классикой. Большинство последующих макетов и реальных планетоходов хоть что-то, да позаимствовали от них. Колеса состоят из трех титановых ободов, с закрепленной на них стальной сетки с грунтозацепами из того же титана. На твердой поверхности опора происходит на средний обод, на мягком же грунте обод проникает глубоко и тогда работает сетка.


(Пробные варианты колес для Лунохода)
Это два пробных варианта колес для Лунохода. Колесо подрессоривается, в одном случае, с помощью упругих металлических лент, в другом - с помощью цилиндрических пружин вдоль оси колеса.

(Пробные варианты колес для Лунохода)
Еще один вариант - здесь внешняя поверхность колеса сделана из упругой сетки, однако под сеткой размещены ленточные пружины, которые работают когда при ударах сетка проминается. Профиль колеса мешает боковому сползанию. Грунтозацепы (в середине) работают главным образом при прогибании сетки на твердых грунтах.

(Пробные варианты колес для Лунохода)
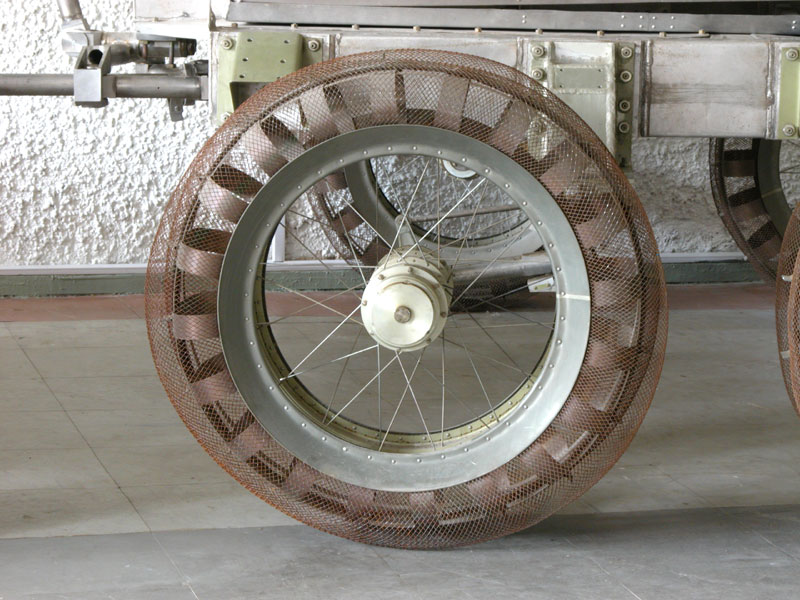
Для планет с сильной гравитацией (Марс, Земля) от непрочной сетки отказываются в пользу сплошной поверхности с грунтозацепами (оболочковое колесо). В случае с марсоходами ученые исходили из первых фотографий "Викинга" где поверхность Марса выглядела каменистой.
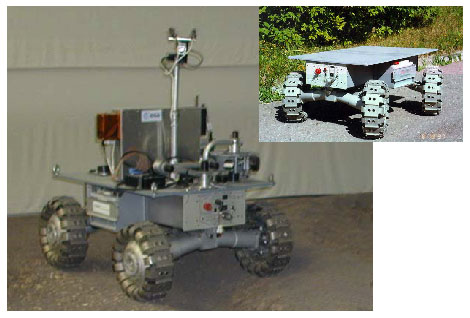
Такие колеса использовались позднее в проекте IARES (1993) и СТР-1 (1986)

(Колесо IARES)
Как видно, во всех конструкциях стараются обеспечить хорошую сцепляемость с грунтом (грунтозацепы, сетка), небольшой вес (отсутствие сплошных дисков, по возможности сетка и спицы, либо сплошное но полое колесо), подрессоривание (спицы, пружины и т.п.), меры против бокового сползания (характерный выпуклый либо вогнутый профиль).
Почти во всех колесных планетоходах колесо представляет собой единый (часто даже герметизированный) модуль, включающий также редуктор, электромотор, тормоз, необходимые датчики. Называется такой модуль "мотор-колесо". Применение мотор-колес позволяет, наряду с подвеской, обеспечивать равную нагрузку на все колеса и эффективное использование мощности на неровностях ландшафта, при повисании части колес в воздухе и т.п.
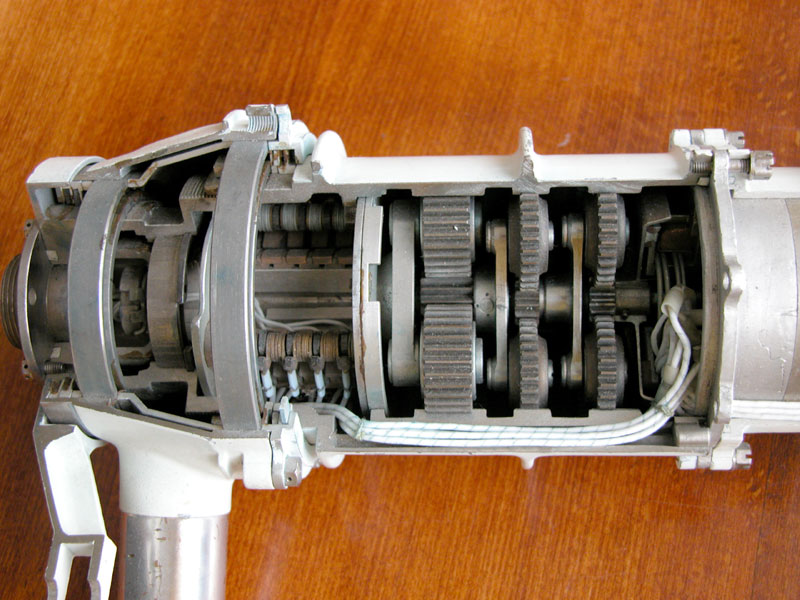
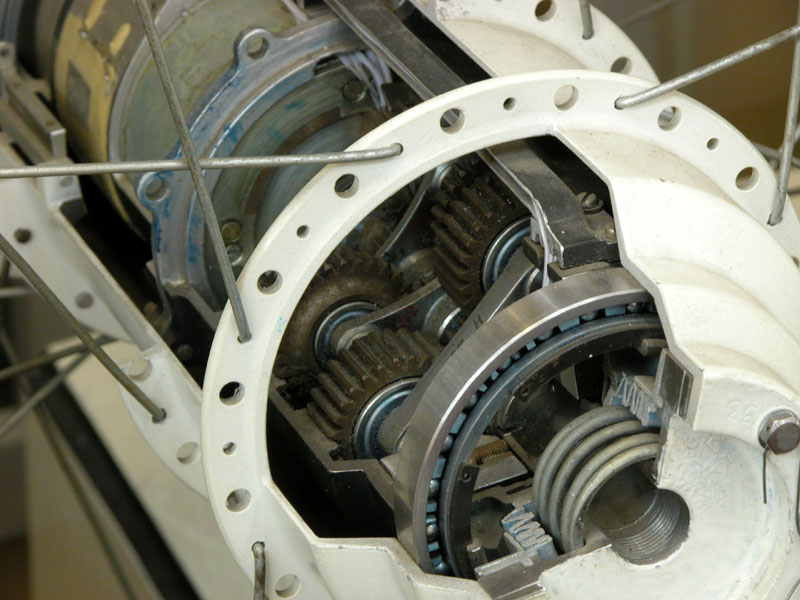
(Мотор-колесо в разрезе)
Если же рассматривать колесный движитель в целом, возникает вопрос - почему у планетоходов, в частности Лунохода, столько колес?
Во-первых, до последнего момента не исключалось использование гусениц. В случае с 8 колесами Лунохода это не потребовало бы полного пересмотра конструкции. Во-вторых, снижение нагрузки на грунт. И наконец, надежность - работоспособность при выходе из строя нескольких колес.
На случай заедания в приводе колес в Луноходе были предусмотрены специальные механизмы разблокировки. Пиротехнический заряд по команде с Земли мог перебить вал и в результате неисправное заблокированное колесо стало бы ведомым. У четырех колесного такое было бы невозможно. К счастью, эта возможность не была ни разу использована.
Подвеску делают независимой для каждого мотор-колеса. Это позволяет преодолевать небольшие выступы и впадины избегая сильных кренов всей машины и перегрузки отдельных двигателей. В идеале, каждое колесо в любой момент времени должно касаться грунта, причем с примерно одинаковыми нагрузками от взаимодействия с ним. Это обеспечивается не только механикой, но и электронной частью, оценивающей нагрузки на двигатели, и подвеску. Механическая часть подвески обычно выполняется в виде рычагов, причем в качестве упругих элементов используются торсионы - стальные или титановые стержни, которые представляют собой "пружину" работающую на кручение. Использование гидравлики проблематично, из-за сильных колебаний температуры на поверхности планет.

(Торсион)
Поучительна история гибели Лунохода-2 - на нем был установлен новый датчик крена-дифферента (весь блок автоматики Лунохода-2 разрабатывался с тройным дублированием - как для обитаемой машины).
Датчик в Луноходе-1 был разработан самим ВНИИТМ, но посчитали, что машиностроительное предприятие должно заниматься своим делом и разработку нового датчика поручили другой организации.
В новом датчике использовалась незамерзающая жидкость. Однако, не была учтена малая сила тяжести на Луне. В результате, сразу после прилунения, датчик оказался нерабочим. А ведь этот датчик должен предохранять Луноход от опрокидывания - автоматически останавливать его, если наклон слишком велик (попутно - позволяет получить представление о геометрии лунной поверхности). Здесь же он показал что Луноход стоит под углом 40 градусов еще до съезда с посадочного модуля.
Пришлось ездить без датчика, ориентируясь лишь на то, что видно через телекамеры - линию горизонта и простой уровень - катающийся металлический шарик. Все шло хорошо, но на третий месяц Луноход заехал в довольно большой кратер. Он стоял там с открытой солнечной батареей и подзаряжался. Когда пришло время выезжать из кратера, недооценили угол наклона. В результате, машина зацепилась солнечной батареей, на нее попал грунт, что привело к падению мощности. Попытки стряхнуть грунт только усугубили положение - грунт попал во внутренний отсек. Так закончил свою жизнь Луноход-2.
Кстати говоря, Луноходу-1 повезло еще меньше - при старте взорвался ракетоноситель. Так что тот Луноход-1 что был на Луне - не совсем первый Луноход.
В любом случае Луноход-2 прошел по Луне намного большее расстояние - 40 км за 3 месяца, чем Луноход-1 - 10 км. за 10 месяцев. Сказался опыт, который приобрели исследователи и водители.


(Камера для имитации атмосферы планет и марсоход в ней)
Возможно для некоторых это станет неожиданностью, но максимальные скорости всех автоматических планетоходов очень небольшие - не более 1-2 км/ч. Собственно, для аппаратов без экипажа это не так важно, поскольку управление ими осложнено задержкой сигнала, которая доходит до десятков секунд. Также, низкая скорость снижает вероятность повреждений при наезде на камень, отсутствуют заносы и т.д.
Наглядный пример - когда у американцев, во время их пилотируемой экспедиции, на Луне застревал в кратерах LRV, они брали его на руки и вытаскивали. Автоматическому планетоходу надеятся на такую помощь нельзя. При этом стоит отметить, что первая колея на Луне была оставлена именно нашим Луноходом-1 - американцы взяли с собой LRV только во второй свой полет - позднее Лунохода.
Большой радиус поворота станет проблемой, если поблизости находится скала или расщелина, куда аппарат может сплозти при развороте.
Самые распространенное решение позаимствовано у гусеничных машин: делая различными скорости колес по левому и правому борту машины (в простейшем случае, с использованием тормозов), можно развернуть ее практически на месте.
Такой подход еще и упрощает конструкцию, повышает ее надежность, поскольку не нужно делать поворотных колес. Общеизвестный пример - "Луноход" (1970).

(Шасси для Лунохода)
Другой вариант увеличения маневренности - поворотные колеса. Например, параллельный поворот всех колес в нужную сторону был реализован в аппарате "ХМ-ПК" (1976)
(ХМ-ПК)
Поворот передней пары в одну, задней в другую - в "LRMC" - Lunar Rover Mockup Chasis (1987)
(LRMC)
.. а также американцами в Opportunity/Spirit и LRV.

(Opportunity)
Интересно, что оба способа разворота в свое время (статья в Технике-Молодежи в конце 1980-х) предлагались для автомобилей - с целью упростить парковку.
Эти варианты удобно реализуются, если каждое колесо планетохода управляется независимо - т.е. с применением описанных выше мотор-колес.
Малоизвестный факт - в самом начале работы Лунохода-1 произошел отказ управления дисковыми тормозами (сгорели катушки электромагнитов). В результате Луноход-1 постоянно ездил на тормозах. Только резерв по тяговой мощности двигателей позволил выполнять задачу (если не считать повышенного энергопотребления).
Следующая проблема - необходимость преодолевать расщелины, не проваливаться на рыхлом грунте. Это может быть решено несколькими путями: колесами большой ширины и диаметра, большим количеством колес по каждому из бортов.
Так например, у Лунохода было 8 широких колес. Их полусферический профиль препятствует боковому сползанию (при движении вдоль склона).
Другой вариант решения (1989) предполагал использование больших (сопоставимых по размеру с самим планетоходом) надувных колес низкого давления с металлическим каркасом и грунтозацепами. Однако, такие колеса плохо выдерживают перепады температур, требуют обслуживания. Зато, они нашли применение на Земле - в тех местах, где необходимо движение по глубокому снегу.

Планетоходы испытывались в Средней Азии, на Камчатке (в зонах свежих извержений) - чтобы было большое разнообразие форм рельефа.. Ведь заранее не было известно, какой грунт, к примеру, на Луне. Были предположения, что грунт находится во взвешенном состоянии и Луноход может просто утонуть. Поэтому испытания проводили также и на снежниках - где снег засыпан вулканическим песком.
Один из сотрудников - участник работ по созданию "Лунохода-1", начальник расчетно-теоретического сектора ВНИИТрансмаш, кандидат технических наук Ф.П.Шпак, даже сочинил гимн водителя Лунохода:
Неожиданно, словно важнейший приказ,
Нам штурвал лунохода вручили,
Чтобы
мы по Луне, понял каждый из нас,
Луноходы ходить научили.
В непогоду
мечтали о солнечном дне,
Руководствуясь нашим законом:
Чтобы несколько
метров пройти по Луне -
Километры пройдем полигоном.
Также испытания проводились и в лаборатории, в "грунтовых каналах" - специальных емкостях с различными грунтами. Эти испытания были очень многочисленными и здесь можно было проверить характеристики даже отдельных фрагментов колеса - будет ли оно проваливаться, какая сцепляемость и т.п.
По словами главного конструктора ВНИИТМ по космической тематике
М.И.Маленкова, грунтовый канал для планетохода - примерно тоже самое, что аэродинамическая труба для разработчиков самолетов.

На планетах, куда сейчас возможна доставка планетоходов, встречается множество камней, скальных выступов, кратеров. То, что для шагающего аппарата будущего, наверное, не будет проблемой (согласитесь, человек легко преодолевает большинство препятствий, которые непреодолимы для колес) для сегодняшних планетоходов проблема весьма актуальная.
Представим ситуацию, когда обычная машина наезжает одним бортом на крупный камень. Возникает крен всей машины и аппарат рискует перевернуться. Для планетохода такое поведение недопустимо, потому подвеска устроена гораздо сложнее - когда одно из колес переезжает камень, остальные могут везти аппарат вполне горизонтально.
Но даже это может не спасти, если камень окажется под днищем планетохода и тот "сядет на брюхо". Поэтому, дорожный просвет (клиренс) стараются делать максимальным. Увеличение клиренса, в свою очередь, может привести к неустойчивости аппарата - центр тяжести должен располагаться как можно ниже (были даже проекты помещать аккумуляторы внутри мотор-колес, но это ведет к другим проблемам).
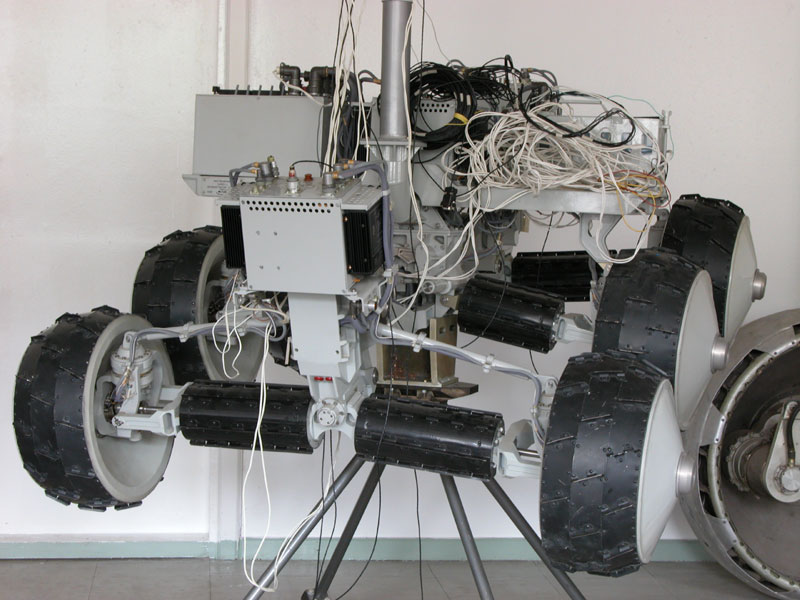
Интересное решение можно проиллюстрировать на примере, пожалуй, наиболее совершенного аппарата, который разрабатывался ВНИИТМ под названиями "Мир" (1988), "ЛАМА" (1994-1995), J-Rover (1996).
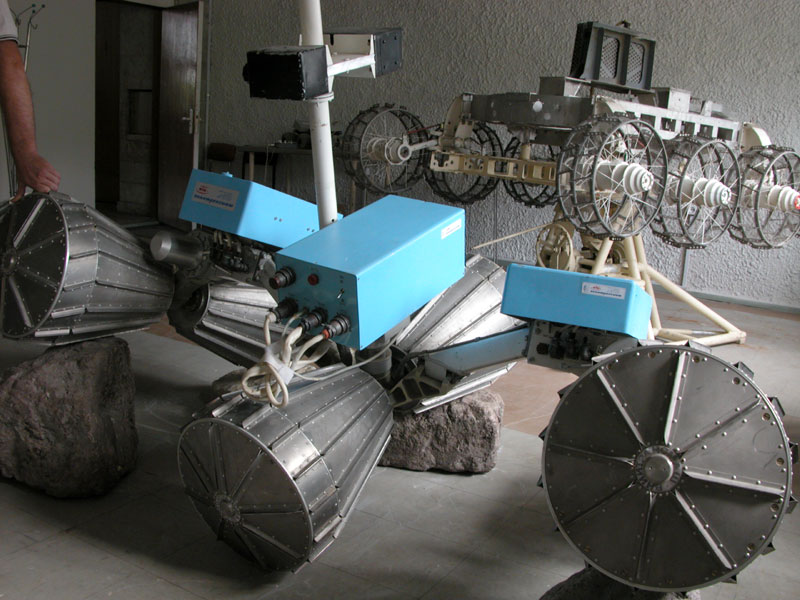
(Мир/ЛАМА/J-Rover)
Здесь клиренс фактически отсутствует - днища нет, вместо него - конические мотор-колеса. Если под них попадает камень, застревания не происходит, поскольку грунтозацепы расположены по всей длине колеса. Есть здесь, впрочем, и недостаток -остается мало места для размещения полезного груза (возможное решение - размещать батареи внутри колес). В другой разработке - IARES - вместо конических колес используются обычные, совместно с валиками, также имеющими грунтозацепы.
(IARES)
Но вернемся к Мир/ЛАМА/J-Rover..
Интересно, что конические колеса были в свое время куплены у ВНИИТМ Мак-Дональд Дугласом,
которые собирались делать планетоход. Однако, американские марсоходы разрабатывались в JPL, которые пошли своим путем.
Во времена же Лунохода разработки с обоих сторон велись в обстановке секретности, так что были полностью независимыми.
Каждая пара колес может независимо поворачиваться под углом около 40 градусов, а также перемещаться вверх-вниз относительно другой пары. Помимо прочего, это позволяет компактно сложить планетоход при транспортировке в космическом корабле.
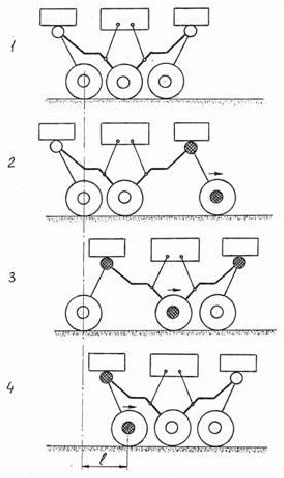
Еще одной возможностью данного колесного аппарата является, как ни странно, шагание. За счет дополнительных двигателей, секции могут немного отъезжать одна от другой. Попеременно блокируя одни пары колес и выдвигая вперед другие пары можно, пусть не быстро, но преодолеть сложное препятствие.
Еще один вариант шагания был реализован в машине "EOSAIII-1" (1978).



(EOSA III-1. Примечание:
грунтозацепы закрыты жестью)
Здесь каждое из шести колес могло работать в двух режимах - катиться (вращение вокруг центра) либо шагать (вращение вокруг точки смещенной относительно центра колеса).
В аппарате "Work Partner" (1998, совместная разработка Rover, ВНИИТМ, HUT) шагание осуществляется при помощью рычагов на которых установлены колеса.

(Work Partner)
В завершение хочется выразить признательность Михаилу Маленкову,
Владимиру Кучеренко и другим сотрудникам ВНИИТМ за помощь в фотосъемке и за подробные пояснения.
Большая часть фотографий - автора статьи (для
всех по клику открывается версия большего размера - 800x600).
Также снимков позаимствовано из других источников.
Также предлагаю приложение к данной статье - другие разработки ВНИИТМ (фотографии).
 "...Эйнштейн, кстати, вздыхал: 'С тех пор, как за теорию относительности принялись математики, я её уже сам больше не понимаю'. Это высказывание математикам по душе. Физикам больше нравится другое (того же автора): 'Существует поразительная возможность овладеть предметом математически, не поняв существа дела'". ... "Шредингер ...далее
"...Эйнштейн, кстати, вздыхал: 'С тех пор, как за теорию относительности принялись математики, я её уже сам больше не понимаю'. Это высказывание математикам по душе. Физикам больше нравится другое (того же автора): 'Существует поразительная возможность овладеть предметом математически, не поняв существа дела'". ... "Шредингер ...далее  "Finally, we come to the instruction we've all been waiting for – SEX!" / из статьи про микропроцессор CDP1802 / В начале 1970-х в США были весьма популярны простые электронные игры типа Pong (в СССР их аналоги появились в продаже через 5-10 лет). Как правило, такие игры не имели микропроцессора и памяти в современном понимании этих слов, а строились на жёсткой ...далее
"Finally, we come to the instruction we've all been waiting for – SEX!" / из статьи про микропроцессор CDP1802 / В начале 1970-х в США были весьма популярны простые электронные игры типа Pong (в СССР их аналоги появились в продаже через 5-10 лет). Как правило, такие игры не имели микропроцессора и памяти в современном понимании этих слов, а строились на жёсткой ...далее
{kind=link}